

被譽為「嫦娥之父」的歐陽自遠院士曾深刻指出:「誰控制了外太空,誰就控制了地球。」這一預言在中國航天的最新壯舉中得到了生動體現——嫦娥六號月球探測器憑藉其先進的技術,在回歸之旅以驚人的31馬赫超高速,在地球大氣層的邊緣巧妙實施了高難度的90度急轉彎,仿佛在太空中演繹了一場精準的「打水漂」絕技。

嫦娥六號返回器的回程十分順利,不僅實現了世界首次月球背面採樣返回,返回地球時的最高速度亦達到了31馬赫。這一超越「奧特曼的速度」,令其成為迄今為止速度最快的返回式航天器。
31馬赫的速度,到底有多快?
據內地軍事評論專欄「科大烽火」解釋,馬赫數是速度與音速的比值,音速在不同高度、溫度和大氣密度狀態下具有不同數值,因此馬赫數只是一個相對值。空氣中的音速在1個標準大氣壓和15℃的條件下約為340m/秒,1馬赫是指飛行體在海平面高度時340米/秒,或1224公里/小時。而隨著高度的增加,大氣溫度的降低,音速值也會下降,例如在2萬米高空的音速值大約為290米/秒。而到了100公里左右的卡門綫(大氣層與外太空的界限),音速值會更低。
如果不考慮高度和溫度的變化,嫦娥六號的31馬赫速度,大約折合為10.5公里/秒,嫦娥六號的31馬赫速度已經高於第一宇宙速度。第一宇宙速度為7.9公里/秒,大約折合為25馬赫。目前射程最遠的洲際彈道導彈的最大關機速度也就是25馬赫左右。而嫦娥六號的速度超過了目前射程最遠的洲際彈道導彈。
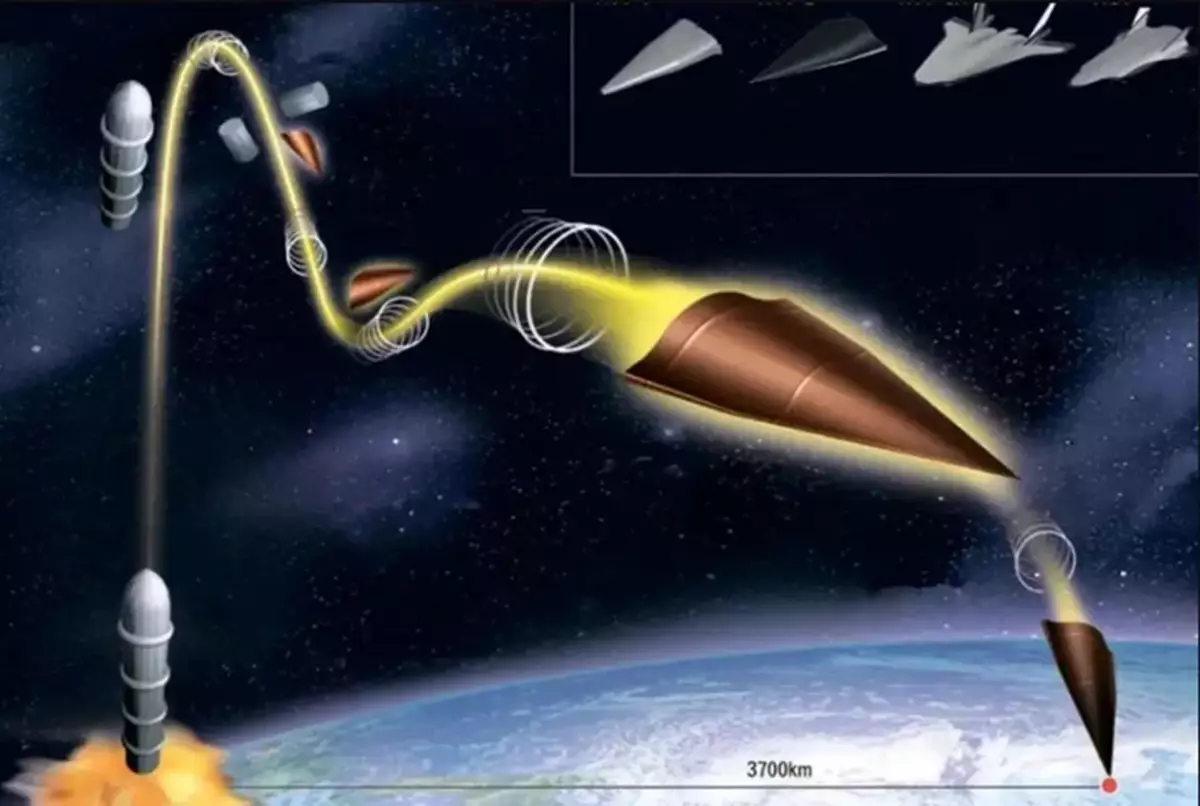
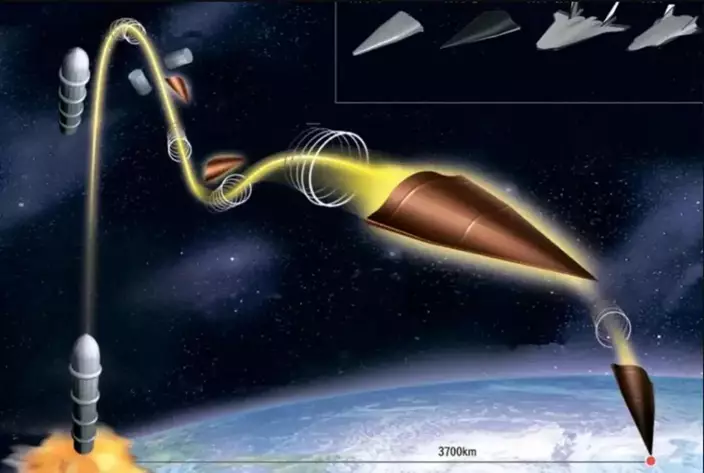
同時,嫦娥六號的彈道十分詭異,再入點的高度為5000公里,是打著「水漂」返回地球的,其後半段的彈道就像是一枚乘波體構型的高超音速導彈。
這次嫦娥6號返回地球,完全是按照「錢學森-桑格爾彈道」回來的,進行了太空「打水漂」機動,而且是二次彈出大氣層,二次再入大氣層,先後打了兩個「水漂」。
「錢學森-桑格爾彈道」,其實是兩個不同的概念。桑格爾彈道是由德國科學家教授桑格爾提出於上世紀30年代,桑格爾設想一種火箭發動機的飛行器,發射後先爬升到100~120公里高度的臨界空間,然後向下俯衝,在大氣邊緣彈跳著飛行,這就是著名的「桑格彈道」。
而此時在美國的科學家錢學森提出了一種革新的彈道設想,先是用火箭發動機將飛行器推送進入太空,軌道高度200~300公里,然後再掉頭俯衝,進入大氣層高度100公里的「卡門綫」下方以後,以滑翔狀態前進,這樣可以用較少的燃料消耗獲得較大的飛行距離。
錢學森彈道的主要特點是飛行器由火箭助推先飛出大氣層,然後在大氣層邊緣進行滑行飛行。而桑格彈道更像是在大氣層裏面跳躍著「打水漂」,後來有人將二者統稱為「錢學森-桑格爾彈道」。
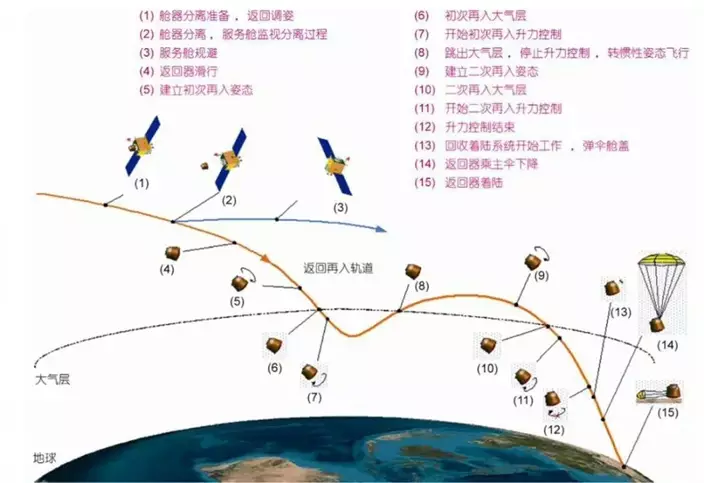
嫦娥6號的軌道器和返回艙在南大西洋海域上空5000公里的高度開始裝訂返回地球的彈道參數,這相當於給一枚太空中飛行的洲際彈道導彈輸入了瞄準數據,然後嫦娥六號的軌道器和返回艙解鎖分離,這相當於帶有分導式多彈頭裝置的洲際彈道導彈釋放核彈頭。返回艙以31馬赫的高速呈彈道式下落,在距離地面大約120公里的高度進入了地球大氣層邊緣,開始第一次氣動减速。
經過第一次氣動减速的返回艙下降至預定高度(大約80公里),然後返回艙翻身調整氣動姿態,在氣動作用下掉頭再次向上彈跳,躍出了大氣層,到達一定高點以後轉身向下,第二次進入了大氣層,開始實施第二次氣動减速。

這個「打水漂」軌道,學名為「地月自由返回軌道半彈道跳躍式著陸技術」。返回艙在距離著陸區數千公里的很遠位置第一次再入大氣層,隨後返回艙被上層大氣「彈」回了太空,最後返回艙再次進入大氣層,减速至開傘正常著陸。這個過程大約相當於一次洲際彈道導彈的乘波體高超音速戰鬥部的「水漂突防」。
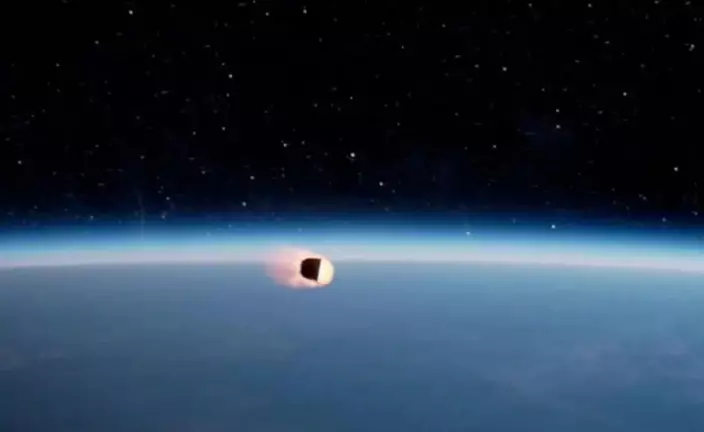
嫦娥六號使用獨特的兩次打水漂返回彈道,也就是「半彈道跳躍式返回技術」,就是針對上述所說的嫦娥六號高達31馬赫的再入速度的。如果嫦娥六號的返回艙直接以這樣的高速返回,那麽數千度熾熱的氣動加熱將是極為劇烈的,嫦娥六號如果單純的采取防熱措施,會大幅度增加返回艙重量。
由於嫦娥六號的高度和直徑都是1.25米,重量只有300公斤,不太可能像幾噸重的神舟飛船那樣大量敷設隔熱瓦,必須結合跳躍式返回彈道來减速,延緩氣動燒灼。
因此必須為嫦娥六號返回器進行大氣層减速,於是中國航天工程師們就按照「錢學森-桑格爾」滑翔彈道設計了一個比較平緩的兩次打水漂條約彈出大氣層的返回彈道,這樣就能把嫦娥六號返回艙的燒灼控制在理想範圍內。
嫦娥6號的整套動作就像是兩次「打水漂」,也稱為「半彈道跳躍式返回」技術。半彈道式返回幷不是中國的獨創,當年蘇聯和美國都應該過,包括蘇聯的Zond-6、Zond-7、Zond-8三次探月返回任務,以及美國阿波羅登月的無人飛船任務。但美蘇的「半彈道跳躍式返回」都比較粗糙,其二次起跳的高度較低,航程增加有限,而且落點精度誤差有數百公里。
而中國把這種技術發揚得非常好,兩次起跳橫跨6000多公里,最終落點十分精確,這說明中國的返回艙控制和姿態都非常完美。嫦娥六號甚至與嫦娥五號的著陸點相距只有1.85公里。這還算上了末端開降落傘的漂移量,如果沒有降落傘,那麽末端精度數百米是可以做到的。嫦娥六號的落點精度非常高,最後的落點與基本瞄準點極為接近,幾乎達到了最理想的狀態。

目前這種技術應用於最先進的洲際彈道導彈和高超音速武器的突防措施上。大家還記得東風-17高超音速導彈吧,這種高超音速導彈就採用了「打水漂」技術,以高超音速在大氣層邊緣連續的「打水漂」突防,讓强敵防不勝防。如果嫦娥6號的返回艙裝有核彈頭,那就是一枚具備乘波體高超音速戰鬥部先進突防能力的洲際彈道導彈。
止戈堂
** 博客文章文責自負,不代表本公司立場 **








