10月26日,在蘇黎世舉行的「全球輔助技術奧運會」(CYBATHLON),又被稱為「半機械人仿生奧運會」,匯集了全球最前沿的仿生技術,涉及義肢、輪椅、外骨骼、腦機介面等多個領域,指在推動人類「輔助技術」的應用創新。今年,中國科學研究團隊創造了佳績,奪取了上肢義肢組冠軍。這是中國科研團隊首次在大賽中奪冠,也打破了往屆義肢組均為純機械式義肢摘冠的紀錄。所謂「賽博化」(Cyborg)的時代,真的來臨了。
中國科學院蘇州醫工所的「90後」博士後胡旭暉帶領著運動員與科研團隊來到蘇黎世,走上了第三屆全球輔助科技奧運的舞台。

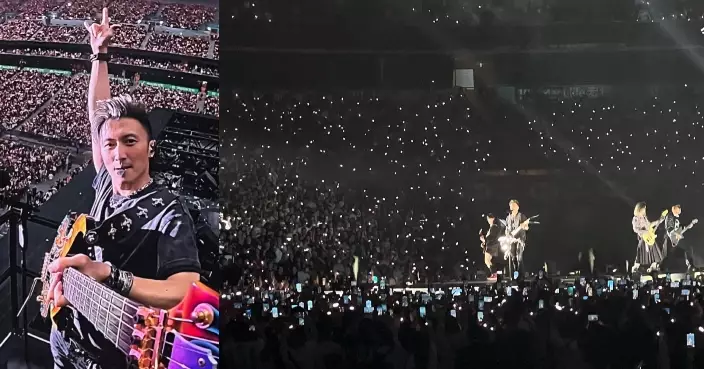
中國科學研究團隊在「半機械人仿生奧運會」,奪取了義肢組冠軍。
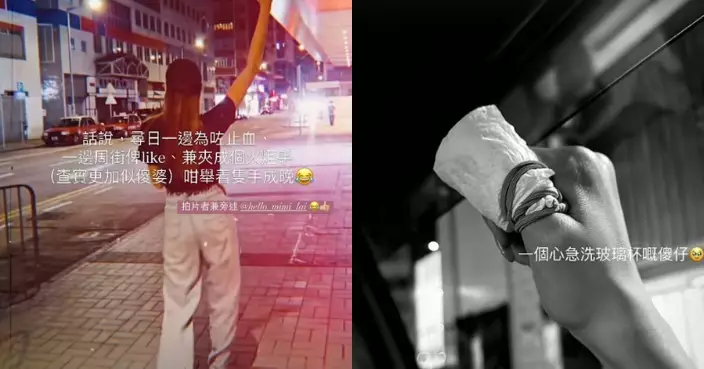
代表「中國隊」出場的選手是來自蘇州的殘障運動員徐敏。她的右臂是一部白色機械手臂,具金屬光澤的科技美感。比賽一開始,徐敏用其機械手臂連續夾起4樽礦泉水,將其放入箱子內,緊接著提起水箱迅速跑到指定地點,把4樽礦泉水完好的取出放在桌上。整個過程中,其機械手臂都沒碰到塑膠樽身,而是完全精準夾中了樽蓋部分。
接下來,她要用機械臂將一隻茶杯拿起擺放在身後的櫃子上,主要考核機械臂的自適應力控制和力觸覺回饋。仿生手臂需依照杯子的形狀和材質去調整抓力,避免用力過大或過小。徐敏相當敏捷自在地完成了動作。隨後,又再次轉身用機械手臂夾起了碗架上的盤子,同樣輕鬆地將其放入櫃子,這環節考驗仿生臂對盤子重量和形狀的感知,以及對抓力的細微調整。

徐敏透過肌肉刺激操作仿生手臂,完成了物體感知以及力的分配,抓起小物。
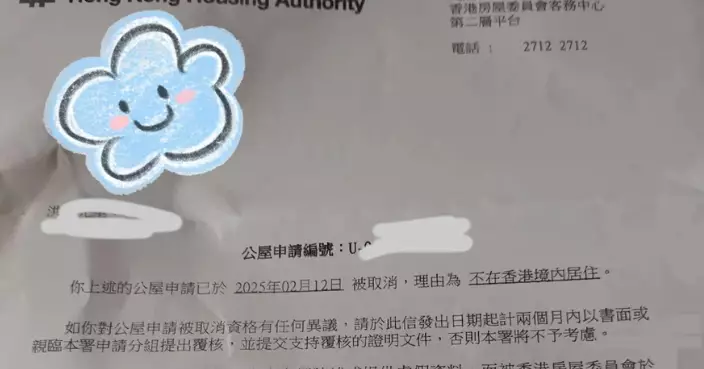
之後,徐敏要穿衣服及拉拉鍊。人類的手最精妙的不只在於握力和拉力,而是一系列神經和骨骼、肌肉精密的操控和配合。拉拉鍊、綁釦子,5歲小孩就可辦到的基礎自理動作,對上肢殘障人士而言,卻是巨大考驗,如換成機械手臂來完成,更是一個極複雜大型系統任務,不僅考驗機械手臂辨識拉鍊位置的視覺辨識準確程度,以及調整抓力和動作的自適應力控制。同樣是對仿生技術能否真正下放到民用市場,解決消費者基礎生活需求的考驗,結果徐敏流暢地拉上拉鍊。
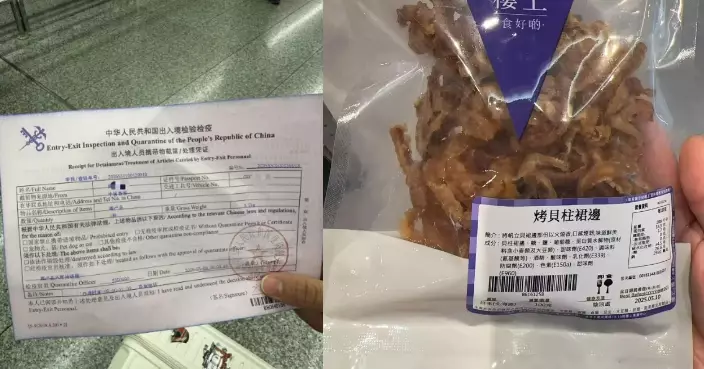
接下來,要進行「盲盒抓取」,要求機械手臂深入到一開口處鋪滿尼龍絲的狹小空間,在視線被遮蔽情況下「摸」到物體並取出,仿生手臂需透過觸覺和力道回饋,才能抓取不同硬度的物體,需視覺辨識和肌肉電訊號辨識等精密技術。
儘管難度很高,徐敏一點點地透過肌肉刺激操作仿生手臂,完成了物體感知以及力的分配,成功過關,抓起了鑰匙和小球。

胡旭暉團隊與徐敏最終以90分的優異成績,擊敗法國隊和意大利隊,奪得上義肢組冠軍。
胡旭暉團隊與徐敏最終以90分的優異成績,擊敗法國隊和意大利隊,奪得「半機械人仿生奧運」上肢義肢組冠軍。
這項比賽始於2016年,由瑞士聯邦理工學院發起,旨在推動仿生技術的發展和應用,幫助殘疾人士更好融入社會的國際性比賽。選手使用半機械義肢或仿生設備完成各種挑戰,展示該領域的尖端技術。
今次帶隊出征的胡旭暉,是東南大學機器人感測與控制技術研究所宋愛國教授的「高徒」。2004年,年僅33歲的宋教授就成為東南大學儀器科學與工程學院院長。全球首台人工智慧放射性粒子介入機器人就是宋教授發明的,主要用於醫療領域,特別是癌症治療,透過機器人的精確控制可將放射性粒子直接植入病灶部位,從而大幅提高治療精確性和效果。

東南大學機器人感測與控制技術研究所宋愛國教授。
另「神舟七號」飛船在執行任務時,出現過太空人開艙門困難的狀況。因太空人在失重環境下,會出現鈣流失與肌肉功能退化等生物力學改變的情況,導致太空人肢體出力情況跟地面相差很大。2008年起,宋教授團隊受中國太空人科學研究訓練中心委託,研發高精準度多維力感測器與航太員操作力測量系統。
宋教授對太空站內太空人的13種操作力、36種操作方式,進行了精確的測量,最後研製出航太員在軌操作力的測量感測器和測量系統。另宋教授還解決了高精度多維力感知問題的中國太空站艙外大型機械手臂;還有具輕量化、多功能、自主導航等一系列特點的月球車等。
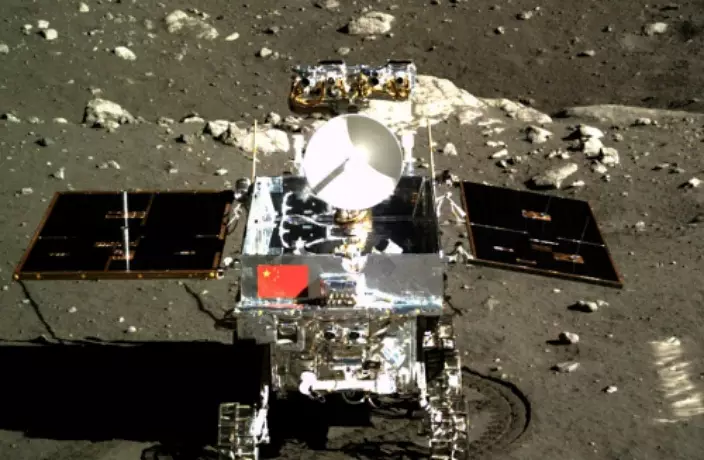
宋教授還研發了具輕量化、多功能、自主導航等一系列特點的月球車。圖為玉兔號月球車。
今次參賽的運動員徐敏,17歲時在電扇廠上班時,被重達60噸的大沖床壓斷了右小臂。2019年,徐敏從蘇州市殘聯了解到了一個「神奇」裝置需徵求試用者的消息,由此認識了胡旭暉,之後更代表了中國參加半機械人仿生的武林大會。

徐敏因工傷失去了右小臂,2019年成為了胡旭暉研發義肢裝置的試用者。
在今次比賽中,蟬聯穿戴式機器人組冠軍的是來自韓國科學技術院的團隊。他們研發的外骨骼,不僅能讓腿部殘障者恢復行走功能,還能躲避不斷移動的障礙物;獲得視覺識別組冠軍的是來自匈牙利的EyeRider團隊,他們為視覺障礙人士開發了一款適用於iPhone 的APP,解決他們日常生活中的導航、物體識別和顏色識別等需求。另德國弗勞恩霍夫研究所團隊憑著在機械手臂開門、螢幕觸控、拿餐具等環節的優秀表現,摘得了金牌。
而比賽也考慮到了全身癱瘓的病人,比拼「概念技術」的腦機介面,由美國史丹福大學的團隊奪冠,他們利用「腦電波」完成了對電動輪椅、機械臂、計算機遊標等設備的控制。
毛拍手
** 博客文章文責自負,不代表本公司立場 **